Motor sürme konusu gün geçtikçe daha ilgi çeker hale geliyor. Bu konuda epeyce yayınım oldu. Yayınlardan bazılarında adım motoru sürmeyi ele almış da olsam, endüktif yüklerin sürülmesi, akım sınırlaması uygulanması açısından söylenenler tüm motor tipleri için geçerli.
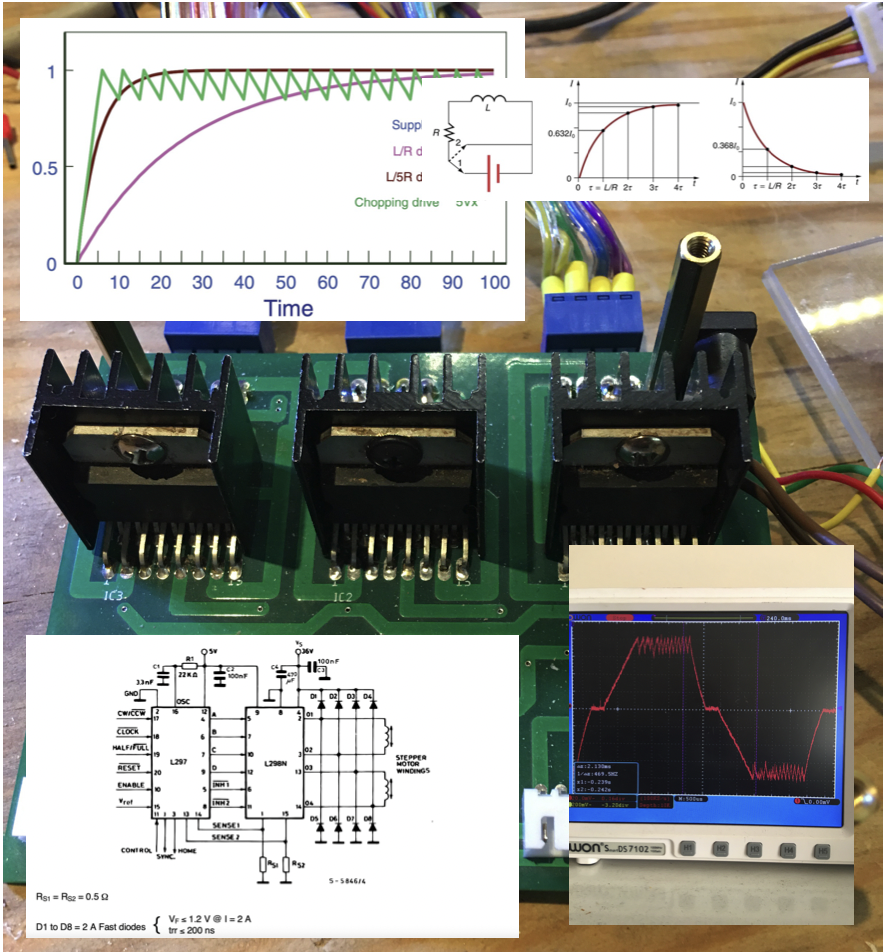
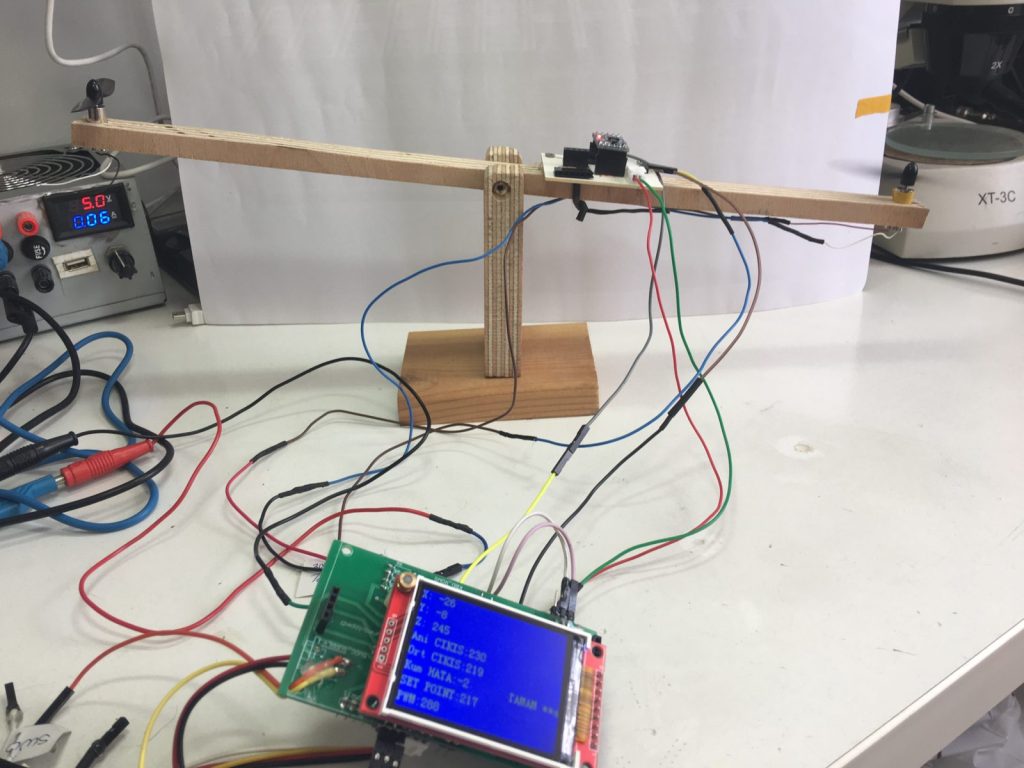
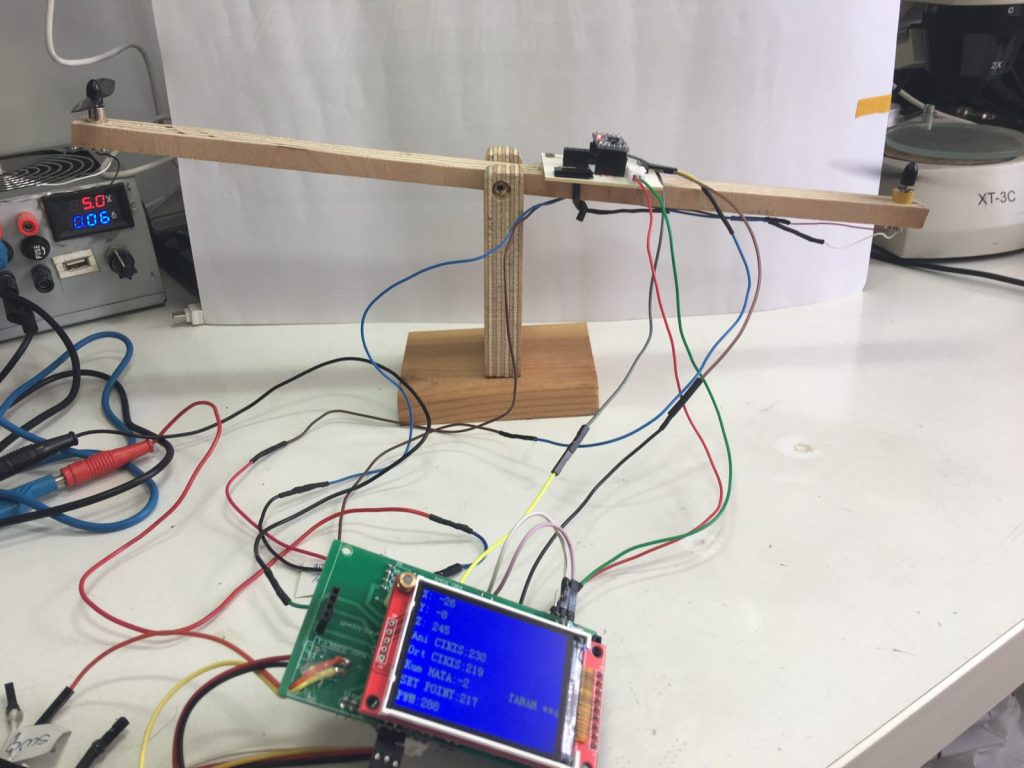
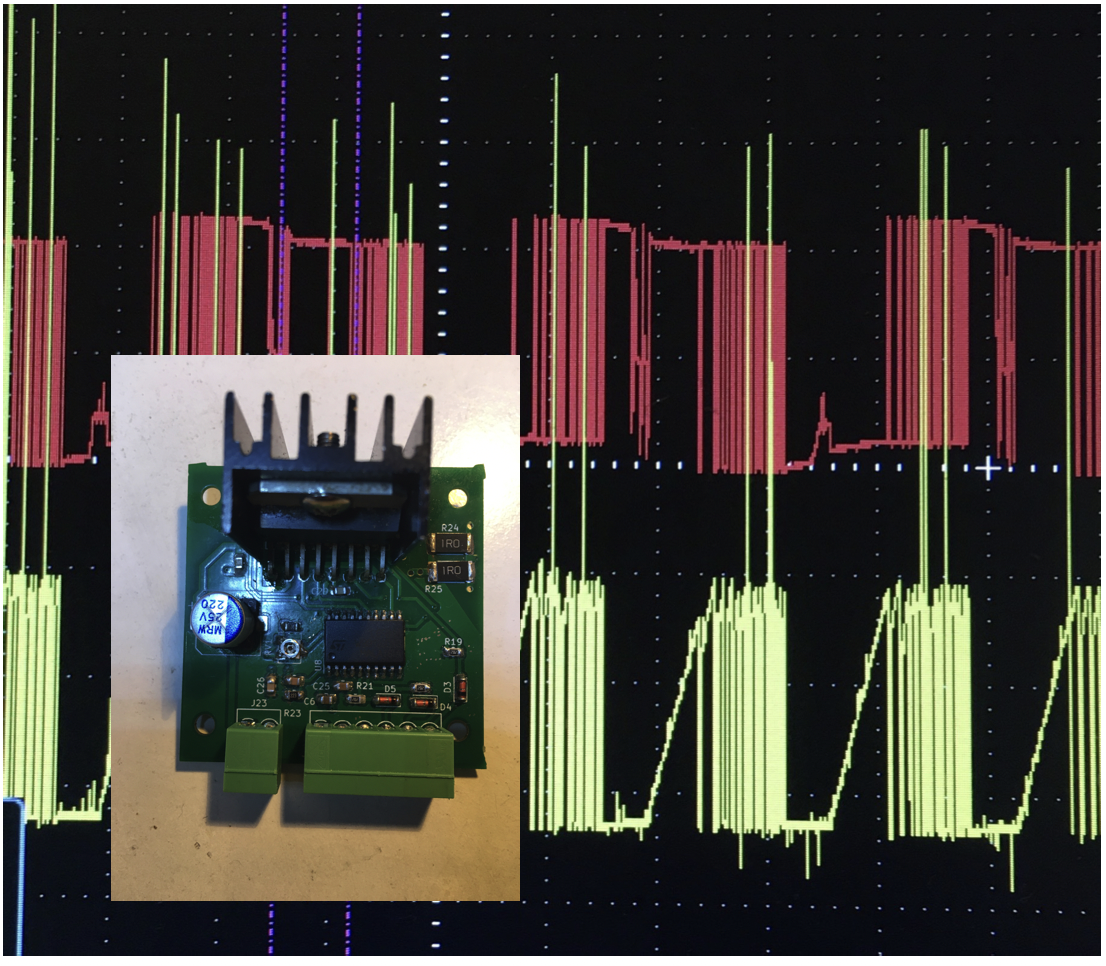
Bu yayında daha önce “PID kontrol altında DC motor sürmek” başlıklı yayınımı/uygulamamı geliştirecek şekilde akım sınırlamasını işin içine nasıl sokacağımızı anlatacağım. Bunu ST Microelectronics’in L298 sürücüsünü L6506 akım sınırlayıcısı ile birlikte kullanarak yapıyorum.
Aşağıdaki yayına göz atılmasını da öneririm, bu yayınla ortak noktalar çok da olsa orada daha iyi anlattığım şeyler bulabilirsiniz.
Akım sınırlaması altında step motor sürmek
Continue reading “AKIM SINIRLAMASI ALTINDA DC MOTOR SÜRMEK (L6506/L298)”