
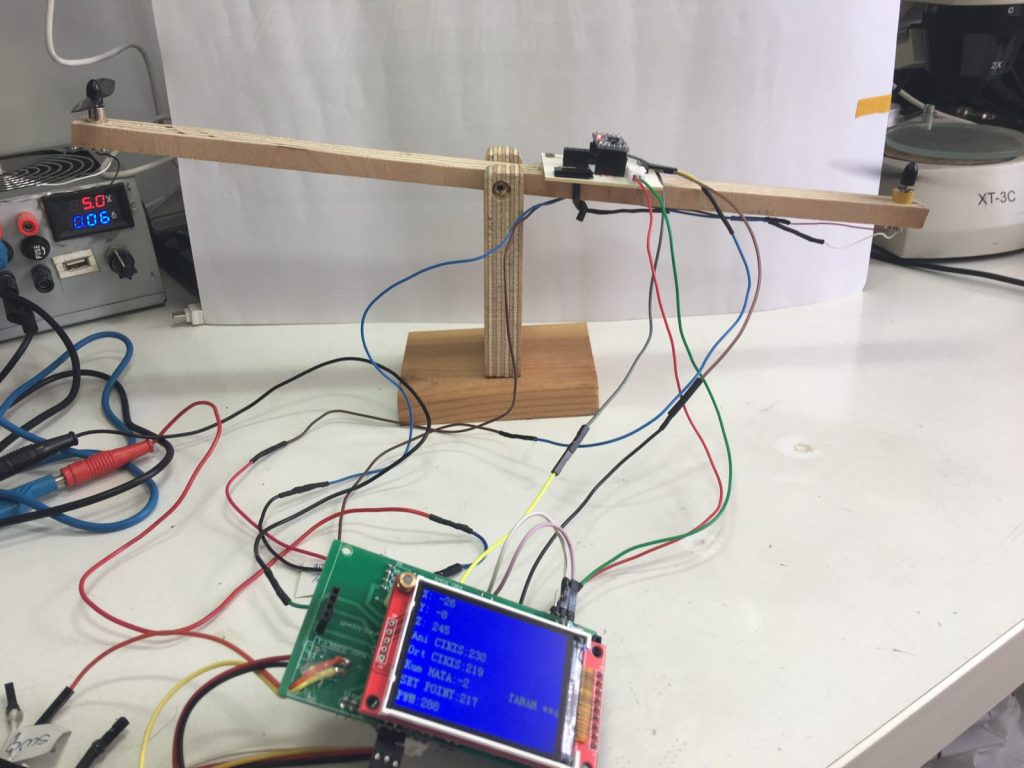
Bir eksen etrafında hareket edebilecek şekilde bağlı bir çubuğu yatay durumda ya da istediğimiz herhangi bir eğimde sabit tutmak istiyoruz. Öyle ki bağlı olduğu platformu nasıl hareket ettirirsek ettirelim aynı eğimi korumaya devam etsin, çubuğu itip pozisyonunu bozsak da hemen kendini toparlayıp önceki eğimine geri dönsün.
Bu projede ortasındaki mafsal etrafında serbestçe hareket edebilen bir çubuktan oluşan “tahtırevalli” yi istediğimiz eğimde tutmaya çalışacağız. Bunun için kontrol işlemcimiz STM32F103, eğim/ivme sensörümüz ADXL345, aktivatörümüz de çubuğumuzun iki ucundaki pervaneli drone motorları olacak. Şimdilik iki motordan birisini kullanacağız, iki motorlu çalışma bir başka projeye…
Türevsel bileşeni bu projede de devreye sokmuyorum ama ne olduğunu, ne zaman kullanılması gerekeceğini matematiğe girmeden basitçe anlatıyorum.
ADXL345 ile eğim ölçme ve PID kontrolu altında DC motor kontrolu hakkında daha önce yayınlarım olmuştu, bu projeye girişmeden önce o yayınlara göz atmakta yarar var derim:
- ESP8266 ve ADXL345 ivme sensörü ile grafik arayüzü
- STM32 ile PID Kontrol altında DC motor sürmek
- İvme ve gyro sensör okumalarından hareketle eğim açılarının hesaplanması
Bu proje çubuğun tek tarafındaki tek motor ile dengede tutmayı ele alıyor. Bunun devamı olan çalışmada aynı işi çubuğun iki ucundaki iki motor ile yapıyoruz. O yayına ulaşmak için aşağıdaki linki tıklayabilirsiniz. İkisi birbirinin tamamlayıcısı olduğundan önce bu ilk yayına göz atmalısınız):
Continue reading “BİR ÇUBUĞU PID KONTROLU İLE İSTENEN AÇIDA TUTMAK”