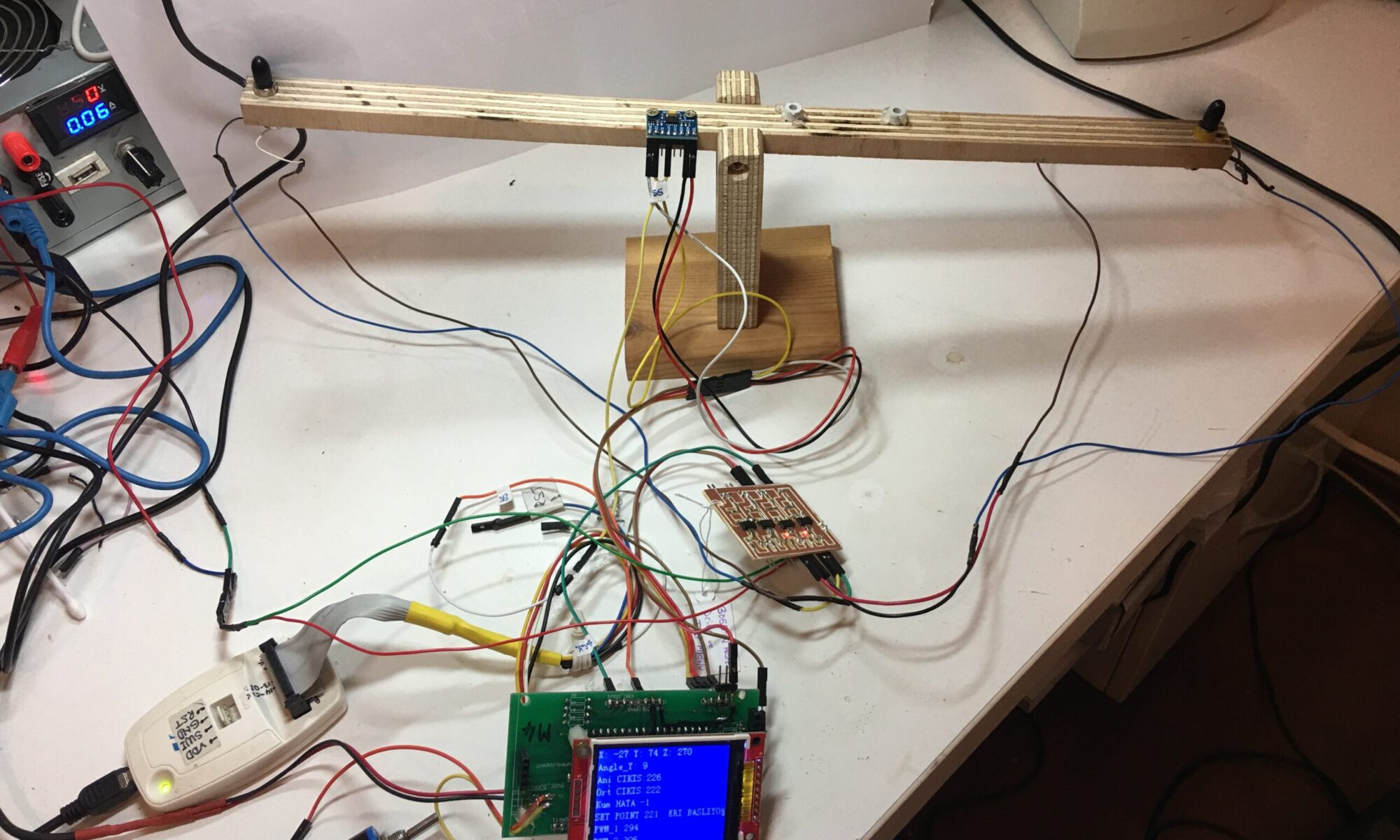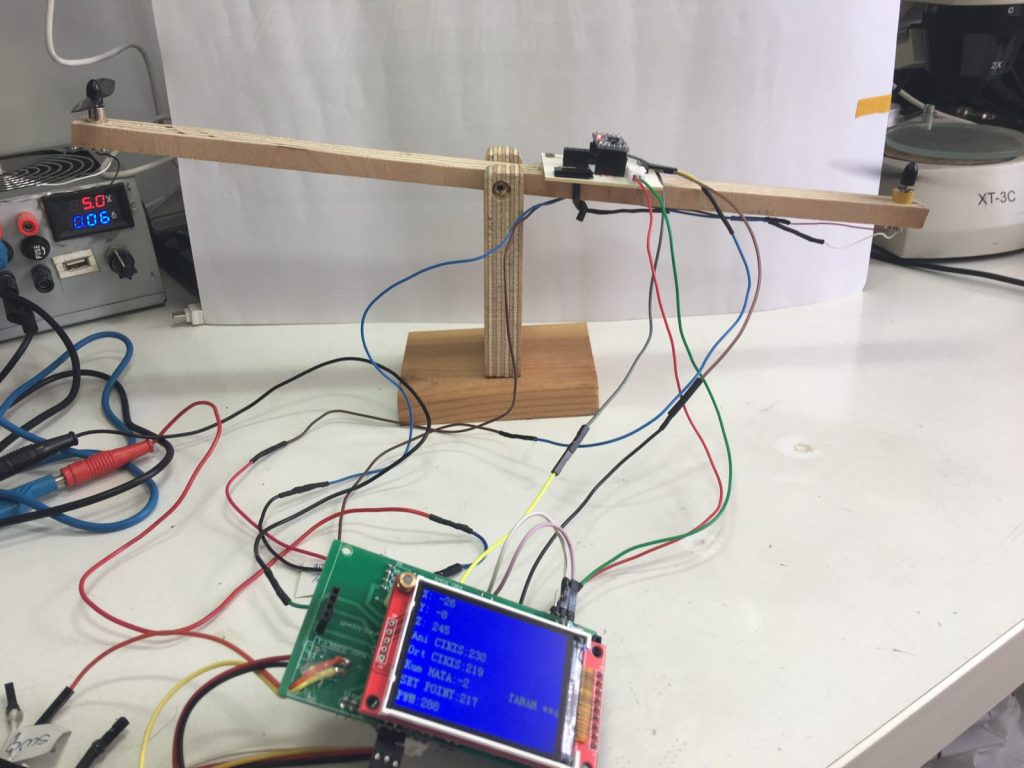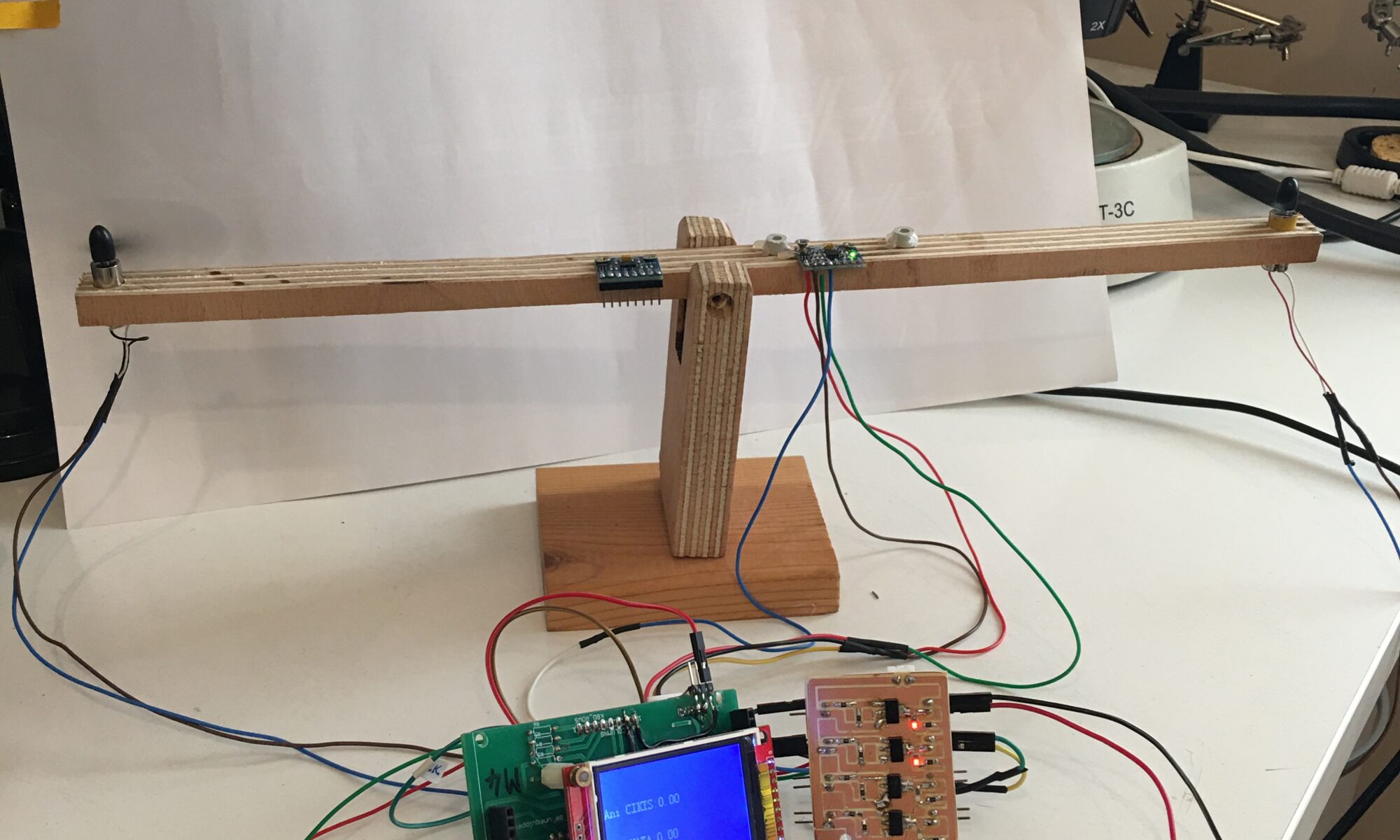
Önceki bölümlerde bu işi yapmak için üç eksenli ADXL345 ivme sensörü kullanmıştım. Projeyi bu defa da MPU6050 ivme sensörü ile gerçekleştirdim. MPU6050 sensörü gyro ölçümleri de yapabilen altı eksenli tipte olduğundan motor titreşimlerinden ve sarsıntılardan etkilenmeyen bir sistem oldu.
PID kontrol prensibi öncekiyle aynı da olsa, açı hesaplamaları, kontrol parametreleri oldukça farklı.
Bundan önce bu konudaki diğer yayınlarıma göz atmanızı öneririm :
- Bir çubuğu PID kontrolu ile istenen açıda tutmak-Bölüm 2 (2 motor)
- İvme ve gyro sensörleri ile eğim açılarının ölçülmesi
- Bir çubuğu PID kontrolu altında istenen açıda tutmak -Bölüm 1 (1 motor)
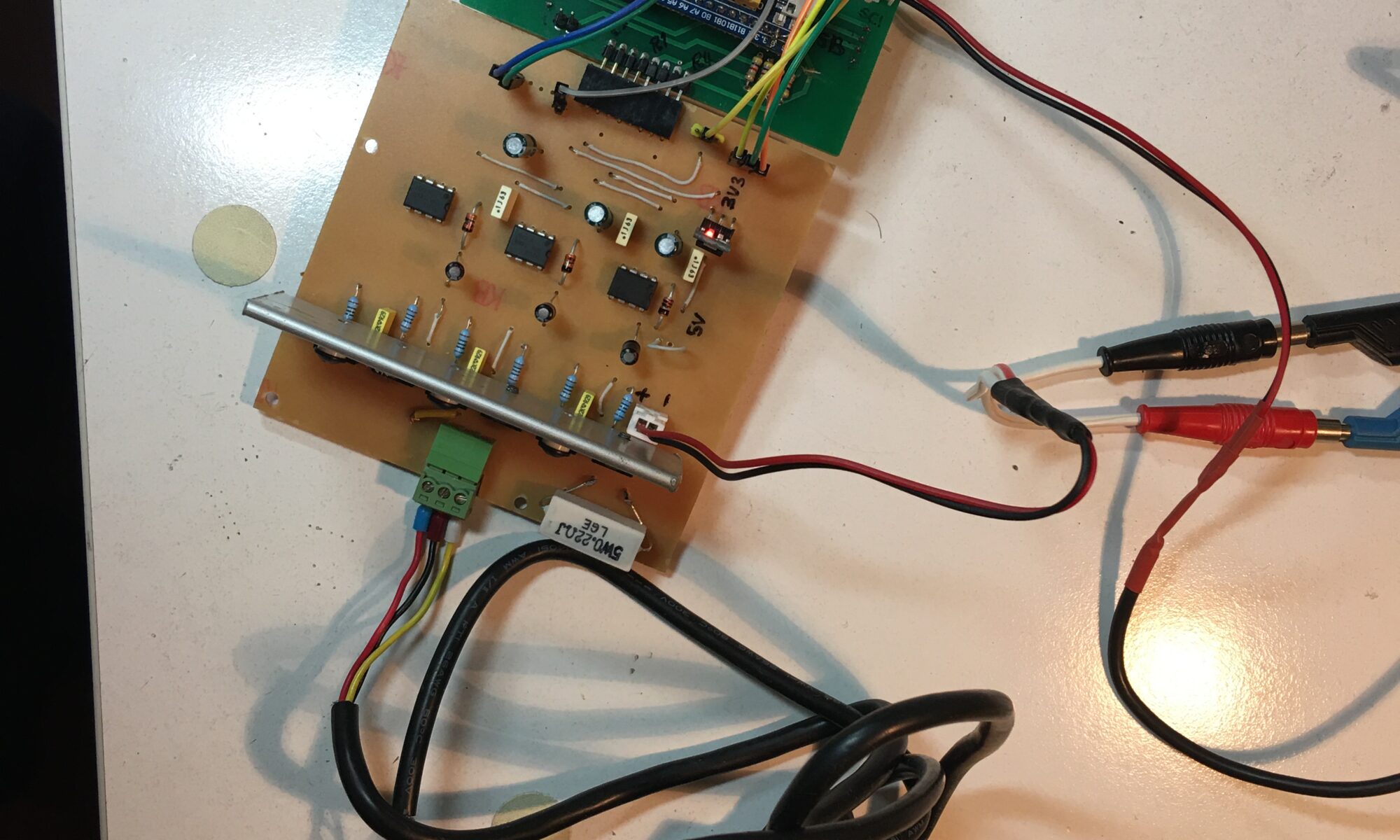
Bu projede çok küçük drone motorlarını 3055 MOSFET lerle sürüyoruz. Daha büyük motorları L298 ile hem de akım sınırlaması altında sürmek için “Akım sınırlaması altında DC motor sürmek” başlıklı yayınıma bakmanızı öneririm. Böyle bir sistemi akım sınırlaması olmadan kullanmak işi eksik yapmak anlamına gelecektir.
Continue reading “BİR ÇUBUĞU PID KONTROL ALTINDA DENGEDE TUTMAK – Bölüm 3 (MPU6050)”